Publicado en
Autor
El campo de los vehículos aéreos no tripulados, conocidos como drones, ha cobrado gran interés en los últimos años. Una aplicación común de los drones es la Ortofotografía, es decir la generación de mapas digitales. Tradicionalmente, estos mapas se han generado utilizando avionetas, globos aeroestáticos, y satélites. Sin embargo, hoy en día es perfectamente factible hacer esto con drones, con un costo mucho menor que las opciones anteriores.
Componentes de un dron
Antes de entrar en detalle, es importante dar a conocer cómo está construido un dron comercial. A grandes rasgos, un dron consta de los siguientes componentes:
Motores.
Carcaza (frame).
Hélices (propellers).
Distribuidores de corriente eléctrica (Power Board).
Controladores de velocidad (Electronic Speed Controls).
Radio transmisores/receptores por Radio Frecuencia.
Controlador de Vuelo (Flight Controller) con puertos de entrada y salida para conectar los diferentes dispositivos.
Baterías y sus respectivos cargadores.
Adicionalmente, existe una gran cantidad de componentes opciones para tareas específicas, tales como sensores de diversos tipos (posicionamiento, temperatura, presión, etcétera), cámaras, pinzas electromecánicas, sistemas de telemetría, por mencionar algunos.
Caso de estudio
En el presente caso de estudio se utilizó un dron tipo “cuadricóptero”, con un controlador de vuelo (“Pixhawk”) con capacidad de ejecutar vuelos autónomos a través de coordenadas geo-referenciadas vía GPS. Las imágenes se capturaron con una cámara Canon S100 modificada (vía software) que guarda la latitud, longitud y altura del punto geográfico donde fue tomada cada fotografía. La cámara se instaló en el cuadricóptero utilizando un soporte especial diseñado e impreso a la medida mediante una impresora 3D. La figura 1 muestra el dron utilizado, el objeto azúl en la parte inferior del dron es el montaje con la cámara, cuyo detalle se muestra en el recuadro.

Figura 1. Dron con montaje de cámara.
El área de vuelo corresponde a un parque público en construcción en la ciudad de Navojoa, Sonora.
El procedimiento utilizado para la obtención de la ortoimagen y del modelo tridimensional del parque en construcción contó con cinco etapas:
Inspección física del espacio a volar.
Planeación y diseño de vuelo y parámetros de fotografía
Ejecución del vuelo y captura de imágenes aérea
Procesamiento de imágenes y validación de la calidad
Generación del modelo tridimensional y análisis.
Inspección física del espacio a volar
En la primera etapa se realizó la inspección física del espacio a volar con el objetivo de identificar elementos físicos que pudieran causar una interrupción no deseada al vuelo del dron, por ejemplo, árboles muy altos, antenas, fuentes de electromagnetismo, edificios, etcétera.
Con esta inspección fue posible detectar una antena cuya altura llegaba hasta los 30 metros de altura, parámetro que se utilizó como base para programar posteriormente el vuelo del dron a una altura de 40 metros para estar siempre por encima de la antena.
Planeación y diseño de vuelo
Una vez realizada la inspección física, se llevó a cabo la planeación y el diseño del vuelo, así como la configuración de los parámetros de fotografía, los cuales son adaptados a las distintas condiciones del plan de vuelo, por ejemplo: la superficie a cubrir (que afecta a la rapidez con la que se deben tomar las fotografías), la velocidad de vuelo, la luz del día del vuelo (que afecta a los parámetros del obturador de la cámara), entre otros.
Para esta fase, se utilizó una aplicación compatible con el controlador de vuelo del dron, esta aplicación se conoce como “Mission Planner”, es de código abierto y está disponible para la comunidad interesada. Dadas las restricciones del tiempo de vuelo por batería del dron (10-15 a quince minutos por cada carga), la zona de vuelo que consta de un perímetro aproximado de 313 metros x 190 metros se dividió en dos partes para poder hacer un intercambio de baterías una vez terminada la primera parte del vuelo.
Para ambas secciones, se programó un vuelo autónomo a 40 metros de altura. La velocidad se ajustó a 5 metros por segundo y se utilizó un intervalómetro en la cámara (vía un script enviado a la cámara a través del “Canon Hack Development Kit”) para que las imágenes se capturaran cada 3 segundos. En otros casos, es posible capturar las imágenes cada determinada distancia, en vez de un intervalómetro, para ello se utilizan cables especiales “disparadores” conectados al controlador de vuelo y a la cámara. Con estos parámetros, se buscaba obtener, en un vuelo por sección de no más de 10 minutos con un 80% de traslape en las imágenes capturadas, lo cual es un parámetro de suma importancia para producir una imagen final de calidad.
Los recuadros morados de la figura 2 muestran el nivel de traslape esperado en las imágenes capturadas. La intensidad del color morado refleja qué tanto traslape se espera en cada cuadro. Los cuadros con mayor traslape generan una imagen de mayor calidad, aunque necesitan mayor procesamiento para ser generados. En estas aplicaciones, 80% se considera un buen porcentaje de traslape en las imágenes.
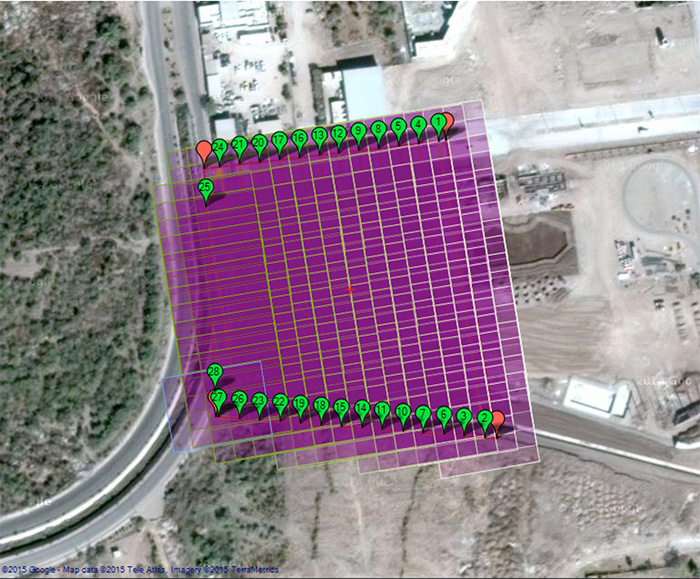
Figura 2. Nivel de traslape esperado.
Ejecución del vuelo
Una vez construidos los planes de vuelo, estos fueron enviados al UAV a través del Mission Planner que comunicamos con el dron mediante un módulo de telemetría via USB que utiliza el protocolo MavLink. En estos planes de vuelo, entre otras cosas, se encontraba la trayectoria geo-referenciada de cada punto por el cual el dron debía volar.
Una vez que el plan se envió al dron, se ejecutó el vuelo de manera autónoma, con el intervalómetro de la cámara accionado para tomar las imágenes cada 3 segundos. Esto significaba que, una vez despegado, el dron alcanzó cada punto geo-posicionado sin necesidad de ser controlado por el piloto a través un control remoto con radio-frecuencia,
Se utilizó el Mission Planner para supervisar en tiempo real las condiciones del UAV durante el vuelo, así como para validar la trayectoria que seguía, entre otros datos. En la figura 3 se muestra un ejemplo de cómo se obtiene la información “en vivo” del dron en un vuelo autónomo.

Figura 3. Monitoreo de captura de datos en vivo.
Procesamiento de imágenes
Una vez capturadas las imágenes, se utilizó la aplicación Agisoft PhotoScan Pro para realizar el procesamiento, verificar la calidad de las imágenes adquiridas (a través de un reporte de traslape), generar el ortomapa final, así como el modelo tridimensional y la exportación de un archivo KML para alimentar a Google Earth.
Las imágenes individuales contaban con una resolución de 1200 x 1600 pixeles. La herramienta utilizada para el procesamiento de las imágenes reportó una resolución de 2.5 cm por pixel. Para el cálculo exacto de la relación de centímetros por pixel, existen técnicas formales más avanzadas, sin embargo, estas quedaron fuera del alcance de este caso de estudio.
El primer paso para la generación de la ortoimagen y del modelo tridimensional es la importación de las imágenes al software de procesamiento. Una vez hecho esto, se puede observar sobre el mapa los puntos geográficos donde fueron tomadas cada una de las fotografías tal y como se muestra en la figura 4.
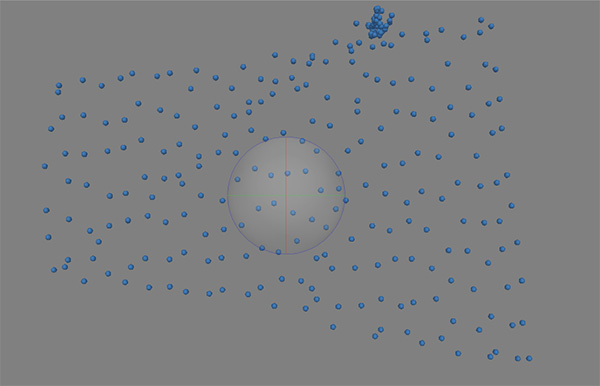
Figura 4. Puntos donde se tomaron las fotografías.
A partir de estas fotografías, la aplicación realizó un intenso procesamiento en el que “analizó” cada pixel de cada una de las imágenes capturadas en el cual encuentra similitudes y continuidades; con ello, la aplicación, crea un mosaico en el que queden unidas todas las fotografías en una única imagen, manteniendo la coherencia y la resolución en la imagen final (ortoimagen).
Para verificar la calidad de la imagen final, además de revisar ocularmente la ortoimagen generada, es posible verificar vía la herramienta el traslape de imágenes (el cual se buscó que fuera de un 80%). En la figura 5 se puede observar el nivel de traslape obtenido con las imágenes capturadas. Las áreas rojas muestran los puntos donde sólo se utilizó una imagen; y las áreas azules oscuro, más de 9 imágenes. Al tomar una muestra de cada una de las zonas se pude observar el porqué de las variaciones en el traslape: en la parte coloreada con verde intenso, se observa que el dron capturó más imágenes que en la parte de color amarillo.
De manera general, el porcentaje de traslape obtenido fue lo suficientemente bueno para generar una ortoimagen coherente y con calidad suficiente para realizar este estudio. Para trabajos que requieren una mayor calidad, este porcentaje de traslape probablemente no hubiese sido suficiente.
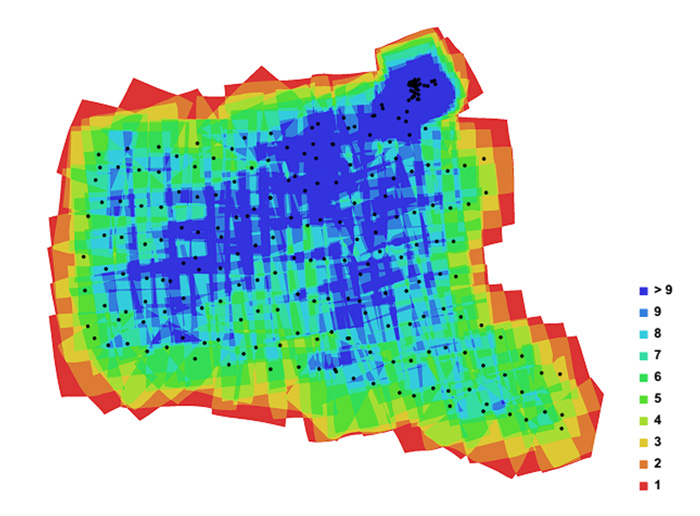
Figura 5. Nivel de traslape de imágenes.
Generación de modelo tridimensional y análisis
Una vez construida la ortoimagen, se generó a través de la misma herramienta el modelo tridimensional, el cual, añade volumen a los objetos de la ortoimagen. Este modelo puede ser exportado y utilizado en cualquier otra herramienta para manipulación de imágenes tridimensionaes. En este caso, se utilizó el servicio en la nube Sketchfab para que el modelo pudiera ser consultado vía web a través del siguiente sitio Web http://goo.gl/3oCgta.

Figura 6. Ortoimagen final.
Conclusiones
Al tener una imagen geo-referenciada y un modelo tridimensional a escala, es posible utilizar estos modelos para diferentes propósitos. Por ejemplo, en la construcción y arquitectura, estas imágenes pueden ser importadas en aplicaciones tipo CAD o GIS para realizar diferentes mediciones como superficies, distancias y volúmenes, además de la posibilidad de inspeccionar visualmente el avance de la obra y detectar anomalías que, a simple vista, no podrían ser detectadas debido a la perspectiva a nivel de suelo que comúnmente se tiene. Otro ejemplo de caso de uso, sería en la conservación de sitios arqueológicos, de hecho, ya hay empresas que se dedican exclusivamente a ofrecer servicios para la arqueología utilizando drones y fotografía aérea geo-referenciada [3].
Por otro lado, para tener una mayor precisión en la generación de un modelo tridimensional y en una ortoimagen, es importante recalcar la importancia de la fase de captura de imágenes. En el caso estudiado en este artículo, el modelo tridimensional generado no fue lo suficientemente rico como para ser utilizado en una aplicación profesional, esto debido a que no hubo suficientes imágenes para generar los volúmenes de los objetos contenidos en la imagen con una mayor precisión, para ello es necesario fotografiar el sitio a diferentes alturas y perspectivas.
Finalmente, como se pudo apreciar en el artículo, el uso de drones para la construcción de ortoimágenes y modelos tridimensionales a escala, ya es algo al alcance de cualquier usuario que pueda adquirir equipo como los que se utilizaron en este estudio (2 mil dólares aproximadamente, incluyendo la cámara), siendo esto algo muy novedoso, con múltiples aplicaciones y con el potencial para generar nuevos negocios en estos momentos.
Referencias
Orto-imagen del parque. https://mangomap.com/maps/34662/Mapa-Parque-Navojoa
Modelo tridimensional del parque. http://goo.gl/3oCgta
Aerial Digital Archeology & Preservation. http://dronearchaeology.com
Mission Planner. http://planner.ardupilot.com/?lang=en
Agisoft PhotoScan. http://www.agisoft.com
Protocolo MavLink. http://qgroundcontrol.org/mavlink/start
Controlador de vuelo PixHawk. https://pixhawk.org/
Canon Hack Development Kit. http://chdk.wikia.com/wiki/CHDK
KAP UAV Exposure Control Script. http://chdk.wikia.com/wiki/KAP_UAV_Exposure_Control_Script
Quauhtli Martínez (@quauhtlimtzz) es director en SOA Software Factory y cofundador de Droneware, empresa especializada en la creación de soluciones usando drones. http://droneware.mx
- Log in to post comments